Fjern- og nærmåling
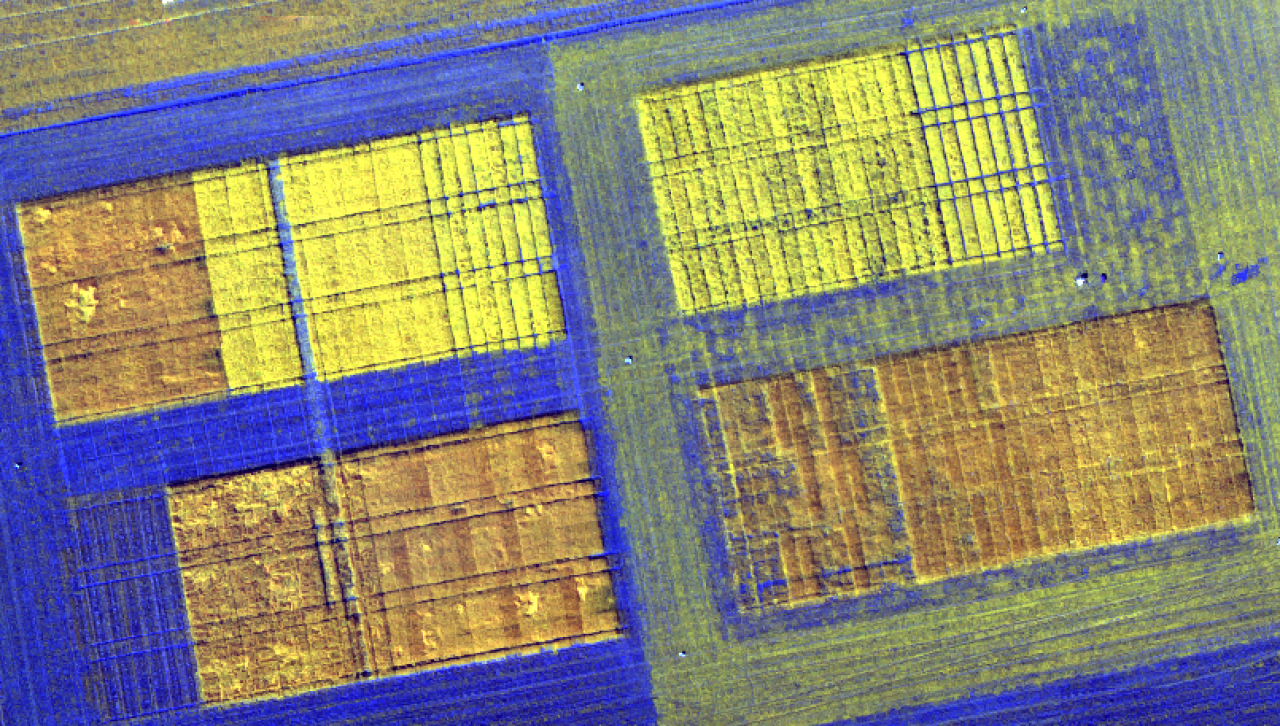
Falskfargebild av grass- og kloverruter i et sortsforsøk.
Foto: Jakob Geipel/NIBIO
Fjern- og nærmåling er en sentral teknologi innen presisjonsjordbruk og innebærer å bruke sensorer for å samle inn data fra jord og planter uten å være i direkte kontakt med disse. Innen presisjonsjordbruk brukes hovedsaklig sensorer montert på droner eller satellitter for å kunne gjennomføre rask og effektiv datainnhenting. Men det brukes også sensorer montert på traktorer eller som bæres i hånda.
Vi opplever en økende interesse for ny teknologi i jordbruket som bl.a. åpner for bruk av presisjonsjordbruk. Presisjonsjordbruk er i stor grad basert på god tilgang på oppdatert informasjon om status i åkeren, med hensyn til avlingsutvikling, biomasse, plantenitrogen, vannforhold, sjukdommer og ugrastrykk. Systemer som kombinerer droner med multi- og hyperspektrale kamera vil spille en viktig rolle for å skaffe slik informasjon på en effektiv og ikke-destruktiv måte. Slike systemer vil effektivt kunne bidra med data fra store områder med høy romlig og tidsmessig oppløsning, noe som er nødvendig for beslutningsstøtte i praksis hos bonden.
På Avdeling landbruksteknologi og Senter for presisjonsjordbruk arbeider vi intenst med å utvikling og testing av avanserte prototyper, droner, sensorsystemer, samt prosessering- og analysemetoder, med mål om at bonden skal kunne ta i bruk ny teknologi så raskt som mulig i praksis.
Målinger utført med multi- og hyperspektrale sensorer montert på roboter, traktorer, droner og satellitter i kombinasjon med kunnskap om planter og plantevekst kan gi oss store mengder informasjon om plantenes tilstand. Med dette kan vi videre utvikle anbefalingsmodeller for stedstilpassede agronomiske tiltak som gir mest mulig optimal utnyttelse av innsatsfaktorer og best mulig avling fra et skifte.
Spektrale bildedata vil si bilder som inneholder informasjon fra ulike bølgelengder av elektromagnetisk stråling, inkludert både det synlige spekteret og det vi ikke kan se med menneskeøyet. Vi jobber først og fremst med målinger av lys i det synlige, rødkant og nær infrarøde området, men andre deler av spekteret kan også brukes.
For å sikre gode modeller og anbefalinger er det kritisk med god bakkesannhet i form av feltforsøk, planteprøver og analyser av høy kvalitet.
KONTAKTPERSON

Jakob Geipel
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 915 66 289 jakob.geipel@nibio.no Kontorsted: Apelsvoll

Krzysztof Kusnierek
Avdelingsleder/forskningssjef
-
Divisjon for matproduksjon og samfunn
(+47) 920 12 953 krzysztof.kusnierek@nibio.no Kontorsted: Apelsvoll
Jiangsan Zhao
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 413 23 321 jiangsan.zhao@nibio.no Kontorsted: Apelsvoll
KONTAKTPERSON
Jakob Geipel
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 915 66 289 jakob.geipel@nibio.no Kontorsted: Apelsvoll
Krzysztof Kusnierek
Avdelingsleder/forskningssjef
-
Divisjon for matproduksjon og samfunn
(+47) 920 12 953 krzysztof.kusnierek@nibio.no Kontorsted: Apelsvoll
Jiangsan Zhao
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 413 23 321 jiangsan.zhao@nibio.no Kontorsted: Apelsvoll
Publikasjoner
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
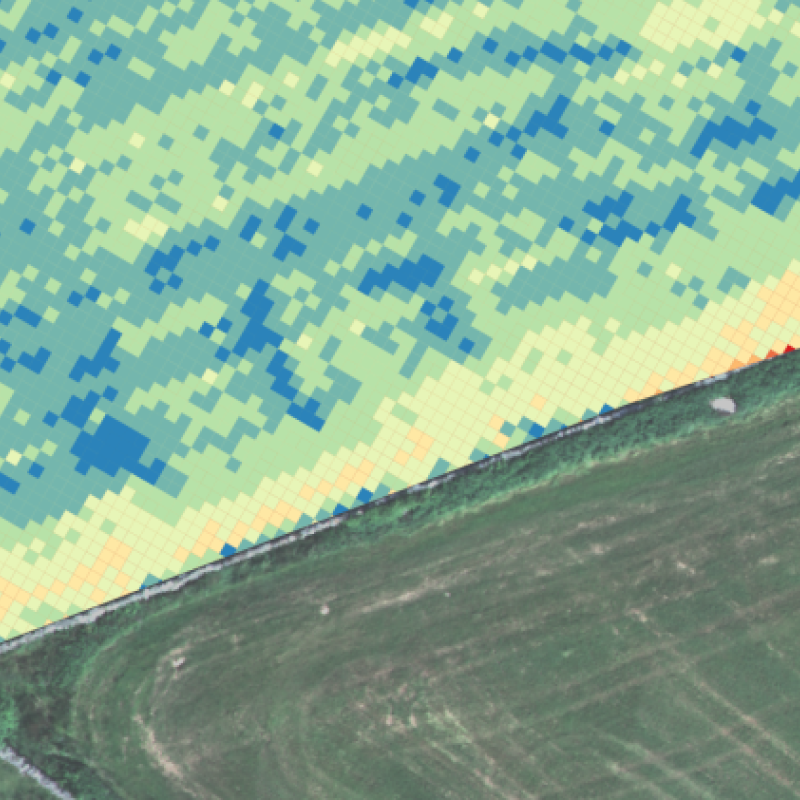
Weeds affect crop yield and quality due to competition for resources. In order to reduce the risk of yield losses due to weeds, herbicides or non-chemical measures are applied. Weeds, especially creeping perennial species, are generally distributed in patches within arable fields. Hence, instead of applying control measures uniformly, precision weeding or site-specific weed management (SSWM) is highly recommended. Unmanned aerial vehicle (UAV) imaging is known for wide area coverage and flexible operation frequency, making it a potential solution to generate weed maps at a reasonable cost. Efficient weed mapping algorithms need to be developed together with UAV imagery to facilitate SSWM. Different machine learning (ML) approaches have been developed for image-based weed mapping, either classical ML models or the more up-to-date deep learning (DL) models taking full advantage of parallel computation on a GPU (graphics processing unit). Attention-based transformer DL models, which have seen a recent boom, are expected to overtake classical convolutional neural network (CNN) DL models. This inspired us to develop a transformer DL model for segmenting weeds, cereal crops, and ‘other’ in low-resolution RGB UAV imagery (about 33 mm ground sampling distance, g.s.d.) captured after the cereal crop had turned yellow. Images were acquired during three years in 15 fields with three cereal species (Triticum aestivum, Hordeum vulgare, and Avena sativa) and various weed flora dominated by creeping perennials (mainly Cirsium arvense and Elymus repens). The performance of our transformer model, 1Dtransformer, was evaluated through comparison with a classical DL model, 1DCNN, and two classical ML methods, i.e., random forest (RF) and k-nearest neighbor (KNN). The transformer model showed the best performance with an overall accuracy of 98.694% on pixels set aside for validation. It also agreed best and relatively well with ground reference data on total weed coverage, R2 = 0.598. In this study, we showed the outstanding performance and robustness of a 1Dtransformer model for weed mapping based on UAV imagery for the first time. The model can be used to obtain weed maps in cereals fields known to be infested by perennial weeds. These maps can be used as basis for the generation of prescription maps for SSWM, either pre-harvest, post-harvest, or in the next crop, by applying herbicides or non-chemical measures.
Forfattere
Jiangsan ZhaoSammendrag
Det er ikke registrert sammendrag
Forfattere
Jiangsan ZhaoSammendrag
Det er ikke registrert sammendrag
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
This paper describes a tool that enables farmers to time harvests and target nitrogen (N) inputs in their forage production, according to the prevailing yield potential. Based on an existing grass growth model for forage yield estimation, a more detailed process-based model was developed, including a new nitrogen module. The model was tested using data from an experiment conducted in a grassland-rich region in central Norway and showed promising accuracy with estimated root mean square error (RMSE) of 50 and 130 g m-2 for dry matter yield in the trial. Three parameters were detected as highly sensitive to model output: initial value of organic N in the soil, fraction of humus in the initial organic N in the soil, and fraction of decomposed N mineralized. By varying these parameters within a range from 0.5 to 1.5 of their respective initial value, most of the within-field variation was captured. In a future step, remotely sensed information on model output will be included, and in-season model correction will be performed through re-calibration of the highly sensitive parameters.
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
In this study, we investigated the potential of airborne imaging spectroscopy for in-season grassland yield estimation. We utilized an unmanned aerial vehicle and a hyperspectral imager to measure radiation, ranging from 455 to 780 nm. Initially, we assessed the spectral signature of five typical grassland species by principal component analysis, and identified a distinct reflectance difference, especially between the erectophil grasses and the planophil clover leaves. Then, we analyzed the reflectance of a typical Norwegian sward composition at different harvest dates. In order to estimate yields (dry matter, DM), several powered partial least squares (PPLS) regression and linear regression (LR) models were fitted to the reflectance data and prediction performance of these models were compared with that of simple LR models, based on selected vegetation indices and plant height. We achieved the highest prediction accuracies by means of PPLS, with relative errors of prediction from 9.1 to 11.8% (329 to 487 kg DM ha−1) for the individual harvest dates and 14.3% (558 kg DM ha−1) for a generalized model.
Prosjekter

Divisjon for matproduksjon og samfunn
PRESIS
I PRESIS, et seksårig samarbeidsprosjekt, jobbet NIBIO med å videreutvikle droneforskning for å fremme presisjonsjordbruk i Norge. Prosjektet leverer forskningsbaserte løsninger i praksis til gårdene gjennom en ny smart farming tjeneste: PRESISnet.
Divisjon for matproduksjon og samfunn
COPERNICUS - Jordbruk
Formålet med prosjektet er å ta i bruk satellitt-data fra Copernicus programmet for å utvikle rutiner og verktøy rettet inn mot jordbruksfaglige problemstillinger, og gjennom dette bidra med informasjon og råd til relevante aktører (bønder, rådgivere, jordbruksnæringa, kommuner, politikere og utdanningsinstitusjoner). Prosjektet skal dermed bidra til å forbedre dagens dyrkningspraksis, som gjennom en bedre utnyttelse av innsatsfaktorer som gjødsel og fôr også bidrar til å redusere klimaavtrykket til det norske jordbruket.

Divisjon for matproduksjon og samfunn
Presis gjødsling og vekstregulering av norske grasfrøenger ved hjelp av sensorteknologi (SmartSeed)

Divisjon for matproduksjon og samfunn
Techgraze – Forbedret beitepraksis i Norge med bruk av avansert teknologi
Redusert beitetrykk og nedleggelse av gårdsbruk har ført til uønskede økologiske og sosioøkonomiske konsekvenser. TechGraze-prosjektet tar sikte på å møte disse utfordringene ved å integrere Virtual Fencing (VF) og Remote Sensing (RS)-teknologier for å forbedre beitebasert husdyrforvaltning.

Divisjon for matproduksjon og samfunn
TEKNOPOTET - Ny teknologi for økt presisjon i produksjon og lagring av små matpoteter
Forbruket av matpoteter er i senere tid dreid mot en økt andel små matpoteter, såkalt delikatessepoteter. Hovedmålet for prosjektet er å utvikle ny kunnskap, teknologi og verktøy for økt presisjon i dyrking og lagring av slike småpoteter. Formålet er at markedet for småpoteter i størst mulig grad skal kunne dekkes av norske småpoteter med rett kvalitet. For at produksjonen skal være lønnsom må antall knoller per plante økes, knollene må ha rett størrelse og være mest mulig jevnstore, og lagringsstrategiene må tilpasses poteter som er små og pakkes tettere i kassene.

Divisjon for bioteknologi og plantehelse
SOLUTIONS: Nye løsninger for nedvisning av potetris, bekjempelse av ugras og utløpere i jordbær og ugraskontroll i eplehager
Håndtering av ugress og andre plantevernutfordringer er viktig for å unngå avlingstap i landbruket. Tilbudet av norske rå-, mat- og fôrvarer påvirkes av at bonden lykkes med sin innsats i åker og frukthager. Et nylig forbud mot plantevernmiddelet dikvat og den usikre framtida til glyfosat – begge viktige innsatsfaktorer i norsk jord- og hagebruk – fordrer nye løsninger. Gode alternativ til ordinære plantevernmidler er dessuten velkomne som verktøy i integrert plantevern (IPV). Norske dyrkere er siden 2015 pålagt å følge IPV. Hensikten med IPV er blant annet redusert risiko ved bruk av plantevernmidler på helse og miljø.

Divisjon for matproduksjon og samfunn
IMPRESS
IMPRESS - Økt presisjon og målretting i gjødsling og avlingsfremmende tiltak i grovfôrproduksjonen Hovedmålet med prosjektet er å heve avling og kvalitet i norsk grovfôrproduksjon gjennom å utvikle og tilpasse presisjonsteknologi, modeller og tiltak for stedsspesifikk bruk av innsatsfaktorer, og for identifikasjon og forbedring av lavtytende områder i enga

Divisjon for matproduksjon og samfunn
SolarFarm
SolarFarm - En systemstudie av hvordan solstrøm produsert på gårdsnivå kan drive elektriske og delvis selvstyrte farkoster i et presisjonsjordbruk med reduserte utslipp av klimagasser
