Moderne teknologi bidrar til økt effektivitet, bedre ressursutnyttelse og mer bærekraftig matproduksjon. Svært mange forskjellige typer teknologi er involvert når vi snakker om teknologi i landbruket. I NIBIO jobber vi innen flere teknologiområder, og jobber for utvikling på noen områder mens vi på andre områder har fokus på best mulig benyttelse av ulike teknologier i norsk jordbruk. En integrert del av vårt arbeid med teknologi i landbruket er vårt Senter for presisjonsjordbruk som er lokalisert på Apelsvoll i Østre Toten kommune.
Maskiner, utstyr og redskap
Landbruket er avhengig av maskiner som traktorer og redskaper for jordarbeiding, feltetablering, plantevern, gjødsling og innhøsting. Utviklingen i dag innebærer også automatisering av selve traktoren til å bli en autonom redskapsbærer og spesialiserte, autonome roboter som utfører spesifikke oppgaver. Smarte maskiner med GNSS og sensorer kan bidra til å spare tid, drivstoff og ressurser.
Sensorikk
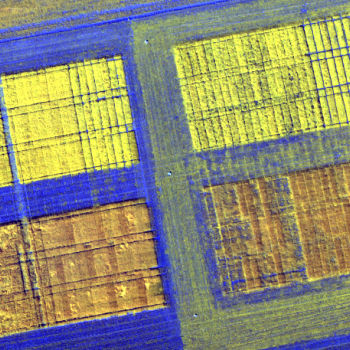
Forskjellige typer sensorer kan gi informasjon om jordfuktighet, temperatur, plantebestand og plantehelse. Slike sensorer kan være montert på forskjellige typer plattformer avhengig av bruk. Noen typer settes direkte i jorda, mens andre sensorer til andre formål vil gi best utnytte når de er plassert på en drone eller en satellitt. I NIBIO jobber vi i hovedsak ikke med utvikling av selve sensoren men hvordan en sensor eller en kombinasjon av sensorer kan benyttes til ulike formål.
Teknologi for presisjonsjordbruk
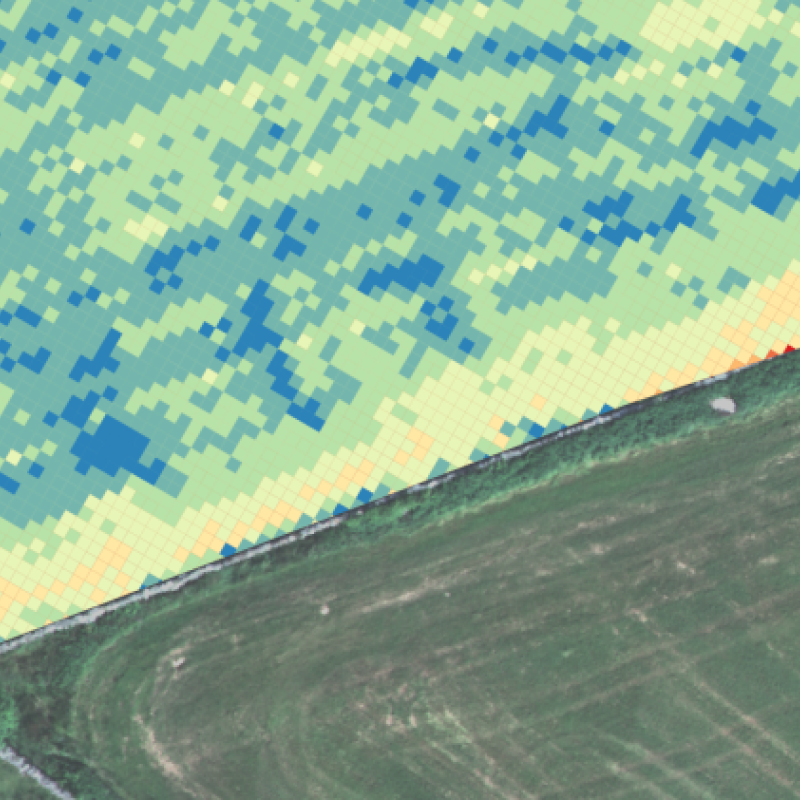
Presisjonsjordbruk er en produksjonsstrategi i landbruket som bygger på innsamling, bearbeiding og analyse av temporale, romlige og individspesifikke data. Disse kombineres med annen kunnskap om produksjonssystemet for å tilpasse tiltak til den identifiserte variasjonen og oppnå bedre ressursutnyttelse, produktivitet, kvalitet, lønnsomhet og bærekraft (Definisjon fra International Society of Precision Agriculture). Effektivt presisjonsjordbruk forutsetter god teknologi på mange forskjellige områder innen landbruket. I NIBIO jobber vi med å gjøre det enklere å få til presisjonsjordbruk under norske forhold. Det vi jobber med her har vi samlet i vårt Senter for Presisjonsjordbruk, som du kan lese mer om ved å følge lenken lenger ned på siden.
Kunstig intelligens, digitalisering og beslutningsstøtte
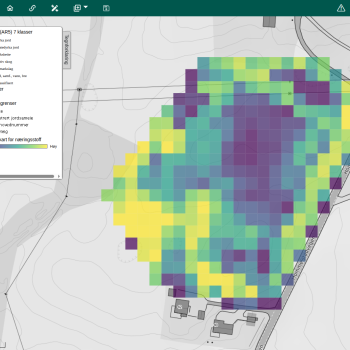
Digitalisering muliggjør innsamling, analyse og bruk av store mengder data til å bedre beslutningene i jordbruket. Riktig bruk av disse metodene kan føre til økt effektivitet og lavere miljøbelastning i jordbruket. Vi jobber for at norske gårdbrukere skal kunne dra nytte av disse systemene, og vi jobber også med å utvikle egne digitale tjenester basert på omfattende datainnhenting fra de norske jordbruksregionene og kunstig intelligens for å bygge robuste og nyttige modeller som kan bedre bondens beslutningsgrunnlag og gi direkte input til presisjonsjordbruket i form av for eksempel tildelingsfiler.
Systemer for dyrking i regulert klima
Innendørs dyrking og dyrking i tuneller gjør det mulig å utvide sesongen for frukt, bær og grønt. Systemer som hydroponi og vertikalt landbruk gir interessante muligheter også i Norge.



.jpg?quality=60)