Jiangsan Zhao
Forsker
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
In broiler breeding, precise counting is crucial for improving production efficiency and ensuring animal welfare. Nevertheless, counting chickens precisely is a challenging task especially when young chicks always huddle for warmth. Although deep learning has been widely taken in different counting related tasks, more accurate localization and counting of chickens in high stocking density scenes still has not been well investigated. We propose a point supervised dense chickens flock counting network (PCCNet), which directly utilizes points as learning targets. The network adopts information feature fusion to assist the identification of broilers high stocking density scenes. In addition, considering the distance of neighboring points as matching cost in point matching algorithms is advantageous for generating more reasonable matching results, facilitating model convergence. To validate the effectiveness of the proposed network, a Chicken Counting Dataset (CCD) is built, consisting of two subsets separated by different ages: CCD_A and CCD_B. The accuracies of PCCNet on the two subsets of CCD are 97.85% and 97.06%, with corresponding Mean Absolute Errors (MAE) of 1.966 and 5.173, and Root Mean Square Errors (RMSE) values of 3.474 and 7.034, respectively. Our model achieves better broiler counting performance than other state-of-the-art (SOTA) methods.
Sammendrag
Interpreting multi-component 1H NMR spectra is difficult due to peak overlap, concentration variability, and low-abundance signals. We cast mixture identification as a single-pass multi-label task. A compact CNN–Transformer (“Hybrid”) model was trained end-to-end on domain-informed and realistically simulated spectra derived from a 13-component flavor library; the model requires no real mixtures for training. On 16 real formulations, the Hybrid attains micro-F1 = 0.990 and exact-match (subset) accuracy = 0.875, outperforming CNN-only and Transformer-only ablations, while remaining efficient (~0.47 M parameters; ~0.68 ms on GPU, V100). The approach supports abstention and shows robustness to simulated outsiders. Although the evaluation set was small, and the macro-ECE (per-class, 15 bins) was inflated by sparse classes (≈0.70), the micro-averaged Brier is low (0.0179), and temperature scaling had negligible effect (T ≈ 1.0), indicating the good overall probability quality. The pipeline is readily extensible to larger libraries and adjacent applications in food authenticity and targeted metabolomics. Classical chemometric baselines trained on simulation failed to transfer to real measurements (subset accuracy 0.00), while the Hybrid model maintained strong performance.

Divisjon for matproduksjon og samfunn
TEKNOPOTET - Ny teknologi for økt presisjon i produksjon og lagring av små matpoteter
Forbruket av matpoteter er i senere tid dreid mot en økt andel små matpoteter, såkalt delikatessepoteter. Hovedmålet for prosjektet er å utvikle ny kunnskap, teknologi og verktøy for økt presisjon i dyrking og lagring av slike småpoteter. Formålet er at markedet for småpoteter i størst mulig grad skal kunne dekkes av norske småpoteter med rett kvalitet. For at produksjonen skal være lønnsom må antall knoller per plante økes, knollene må ha rett størrelse og være mest mulig jevnstore, og lagringsstrategiene må tilpasses poteter som er små og pakkes tettere i kassene.

Divisjon for matproduksjon og samfunn
TEKNOPOTET – New technology for increased precision in production and storage of small-sized potatoes
The aim of project is to combine new tehnologies and knowledge about physiological status of potatoes to increase the precision of growing and storing of small-sized potatoes.
Divisjon for matproduksjon og samfunn
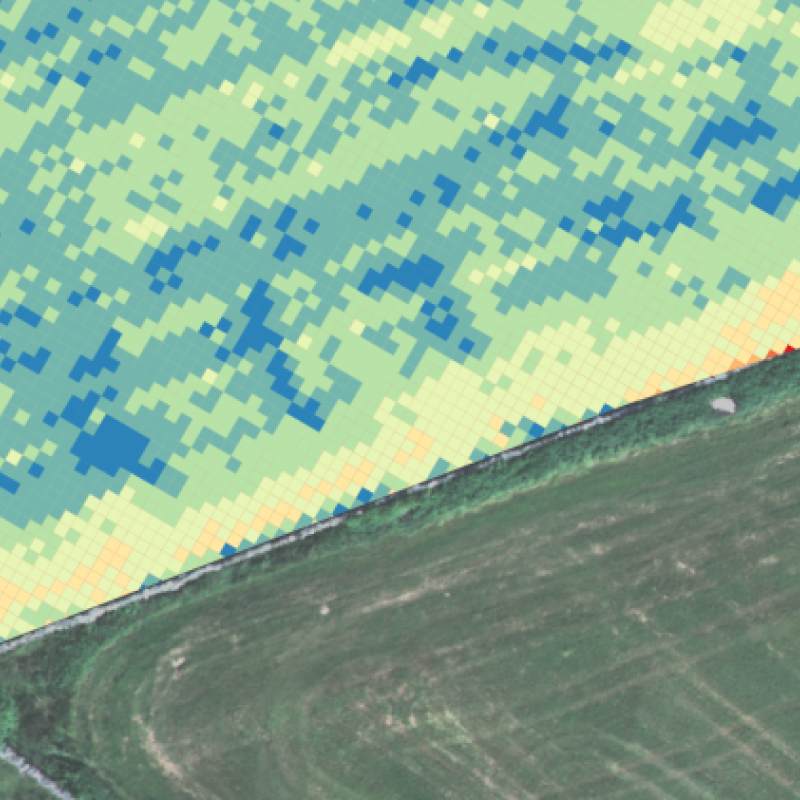
COPERNICUS - Jordbruk
Formålet med prosjektet er å ta i bruk satellitt-data fra Copernicus programmet for å utvikle rutiner og verktøy rettet inn mot jordbruksfaglige problemstillinger, og gjennom dette bidra med informasjon og råd til relevante aktører (bønder, rådgivere, jordbruksnæringa, kommuner, politikere og utdanningsinstitusjoner). Prosjektet skal dermed bidra til å forbedre dagens dyrkningspraksis, som gjennom en bedre utnyttelse av innsatsfaktorer som gjødsel og fôr også bidrar til å redusere klimaavtrykket til det norske jordbruket.

Divisjon for matproduksjon og samfunn
Techgraze – Integrating Advanced Technologies for Enhanced Grazing Practices in Norway
In Norway, a declining grazing pressure and farm abandonment have led to undesirable ecological and socio-economic outcomes. The TechGraze project aims to address these challenges by integrating Virtual Fencing (VF) and Remote Sensing (RS) technologies to enhance pasture-based livestock management.

Divisjon for matproduksjon og samfunn
Techgraze – Forbedret beitepraksis i Norge med bruk av avansert teknologi
Redusert beitetrykk og nedleggelse av gårdsbruk har ført til uønskede økologiske og sosioøkonomiske konsekvenser. TechGraze-prosjektet tar sikte på å møte disse utfordringene ved å integrere Virtual Fencing (VF) og Remote Sensing (RS)-teknologier for å forbedre beitebasert husdyrforvaltning.